北航《Applied Physics Letters》: 具有高运动精度和高输出力的可变形磁流体机器人
发布日期:2021-09-01
浏览量:1594次
在生物医学研究中,对生物颗粒(如细胞和生物组织)的操作,特别是捕获和运输,是各种生物应用的基础。许多工具和驱动系统被设计用来提高操作的准确性和效率。磁驱动机器人具有精确操纵粒子或生物组织的能力,在生物医学、生物工程和生物物理学领域具有重要的潜力。然而,具有预定形状的刚性机器人的变形能力是有限的,这限制了其在狭小的空间的运动。
近日,北京航空航天大学机械工程学院仿生与微纳研究所冯林副教授等研发了一种可变小型机器人,该机器人是利用具有磁性和流体性质的铁磁流体这一新型材料所研制的。该磁流体基机器人不仅可以根据不同的磁场的分布形成不同的形状,从而完成不同的任务;并且还可以借助于操作平台的疏水处理,使得磁流体基机器人与基板间的摩擦减小,进而简单高效地提高了机器人的实际输出力。
图1. 通过多种形状的永磁铁产生的集中磁场改变磁流体形状进而达到搬运不同模块的目的
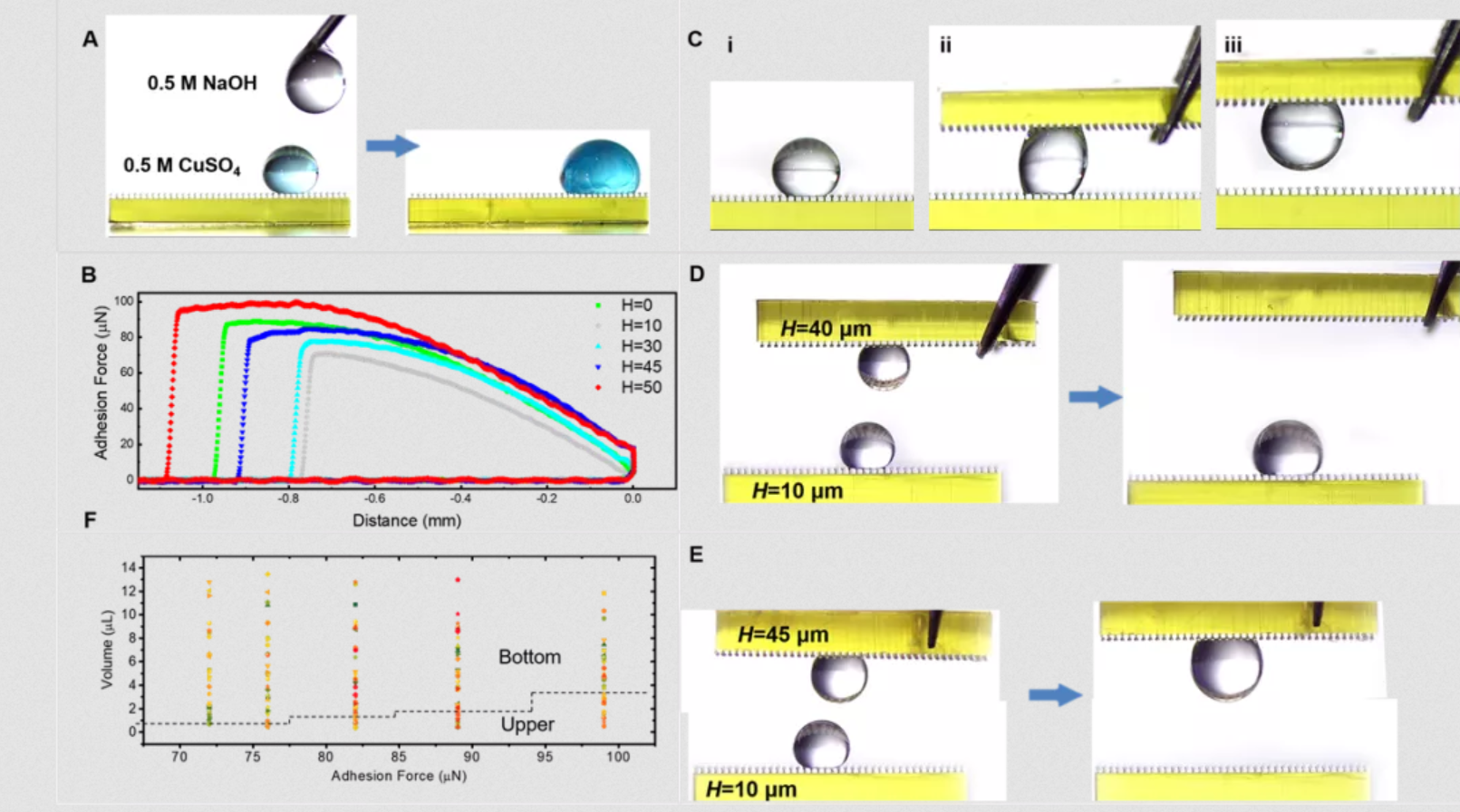
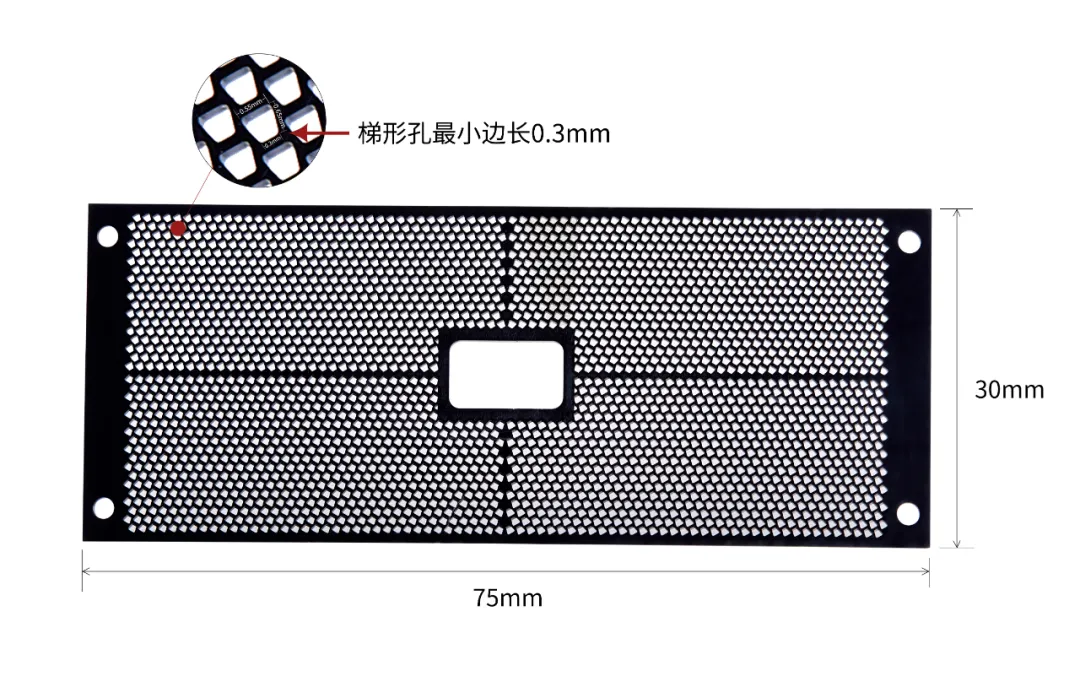
为了证明这种磁流体基机器人所具有的且刚性机器人所欠缺的实际应用能力,作者设计了几个验证实验:1.制造不同形状的永磁体并磁化,观察不同磁场下磁流体基机器人的变形情况;2. 打印不同形状的模块,测试磁流体机器人的搬运能力;3.打印狭缝,测试机器人穿越窄缝的性能。通过采用PμSL 精密3D打印技术(nanoArch S140精密3D打印系统设备,摩方精密),实现了验证实验中的搬运模块、永磁模具及狭缝的精密制造。
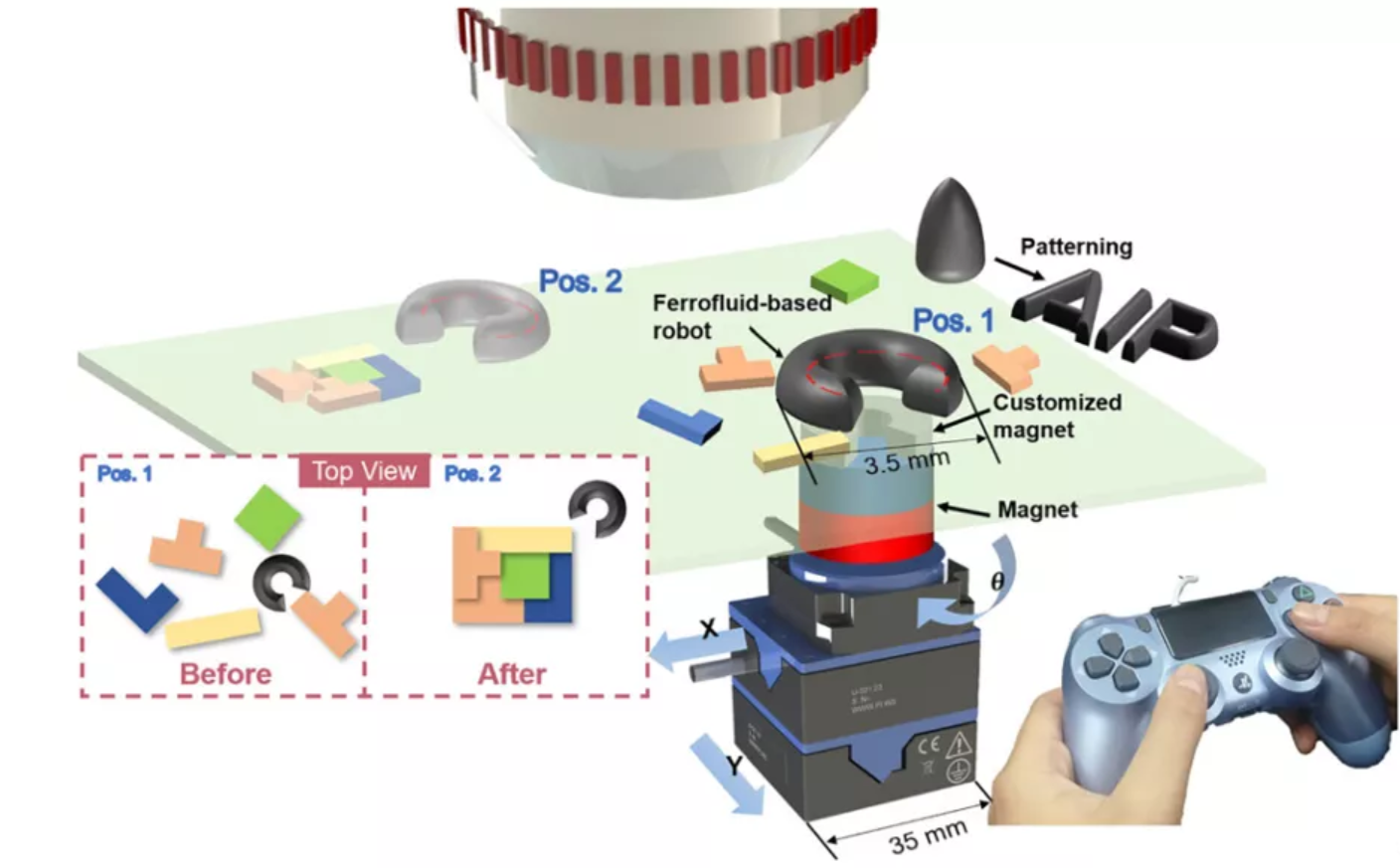
图2. 永磁体的制造流程及磁流体基机器人的变形
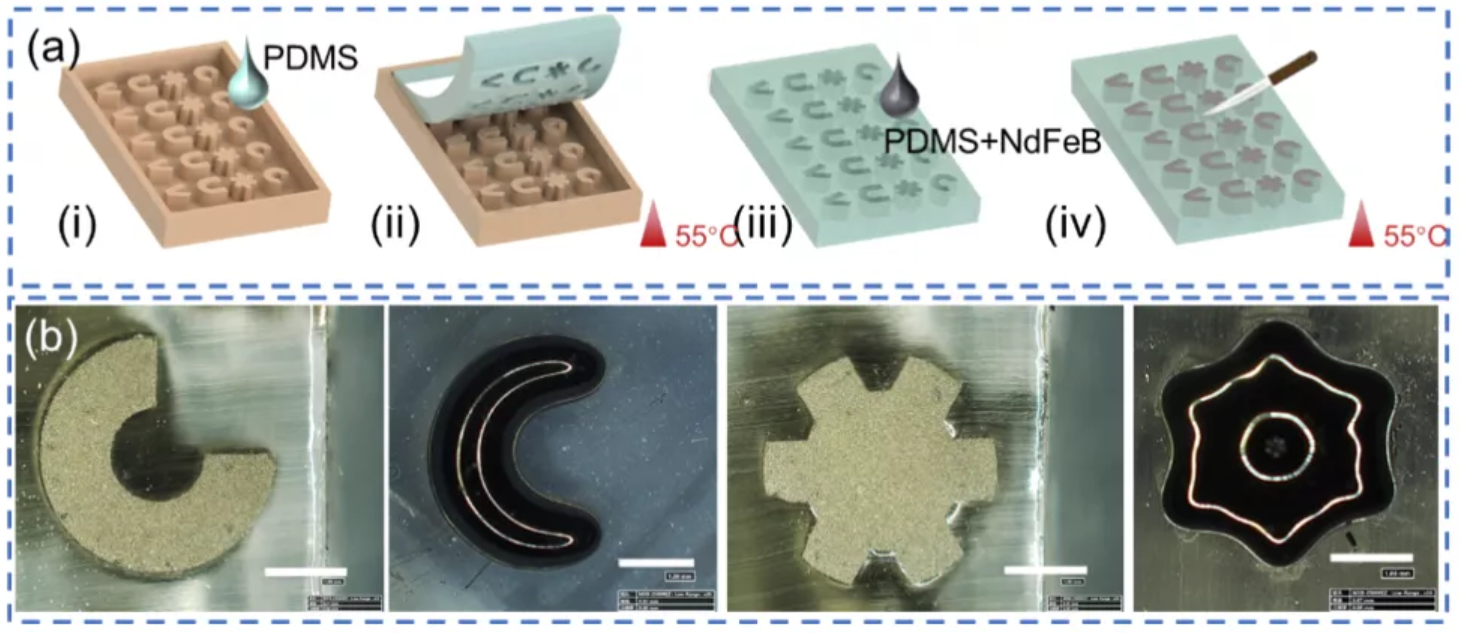
图3. 磁流体基机器人在平面上的三自由度运动
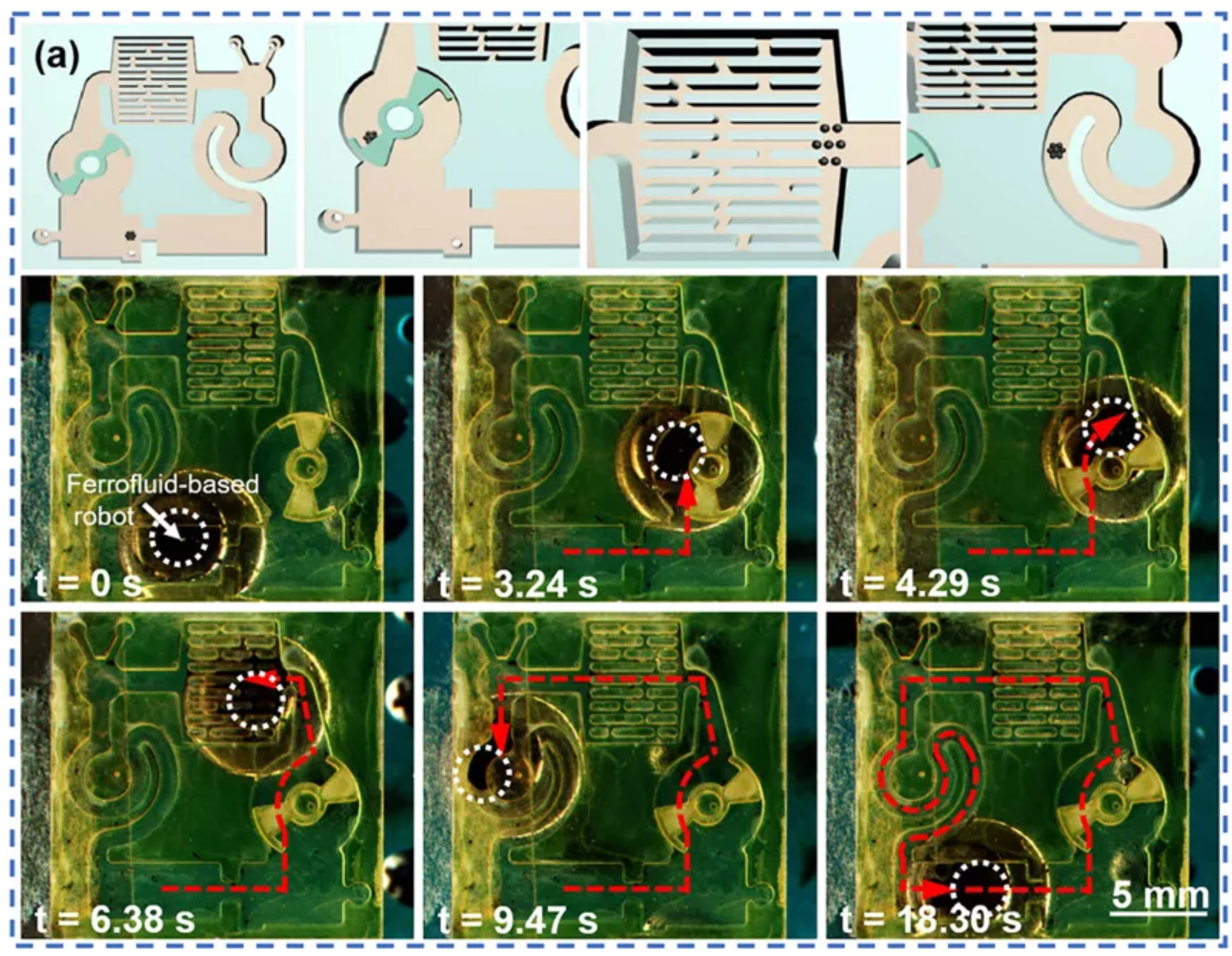
图4. 磁流体基机器人穿越狭缝动画及实物演示
该项研究成果获得国家重点研发计划(No.2019YFB1309700)及北京新星科技计划项目(No. Z191100001119003)支持,以“Deformable ferrofluid-based millirobot with high motion accuracy and high output force”为题发表于国际期刊《Applied PhysicsLetters》(北京航空航天大学陈迪晓硕士为第一作者)。
文章链接:
https://doi.org/10.1063/5.0042893