NTU佐藤裕崇/王一凡合作:基于改性聚合物3D打印的功能化金属微结构制造
发布日期:2023-01-17
浏览量:1553次
金属三维微结构由于其具有的独特的光学、热学、磁学、电子学和催化特性,在微机电系统(MEMS)、集成电路、高频电子、光电子、小型飞行器和支架等微尺度系统、微流体和微型机器人等领域具有极大的应用潜力。尽管存在用于制造宏观尺度三维金属结构的成熟技术,但到了微观尺度时,现有技术都较难实现。因此目前,先进行聚合物打印,以创建复杂的微 3D 结构,而后在结构表面镀一层金属这一方法引起了大家的兴趣。相比于传统的金属打印样品,3D 金属-聚合物复合功能器件具有更复杂、精密的结构,更轻的重量,以及更高的设计自由度和更高的集成度。
近期,南洋理工大学的Hirotaka Sato教授团队,王一凡教授团队以及早稻田大学的Shinjiro Umezu教授团队合作提出了一种新型的金属-聚合物微尺度三维结构的制造方法。该方法采用将催化剂前体加载到光固化树脂中的方法,利用新型微立体光刻技术(摩方精密nanoArch S140超高精度3D打印系统)进行复杂结构的高精度3D打印,并使用NaOH 溶液对打印样品进行预处理,以增加催化剂前体 [Pd(II)] 的存在,便于后续将金属化学镀(ELD)到打印样品上。 与传统工艺相比,该工艺更加安全环保,并且耗时更少,同时更加便宜。此外,此方法还可以实现金属的多层沉积以获得具有所需特性组合的多功能结构。该制造方法克服了传统化学镀工艺的瓶颈,例如进行预处理时对有毒化学品的使用。相关成果以“Modified polymer 3D printing enables the formation of functionalized micro-metallic architectures”为题发表在《Additive Manufacturing》期刊上。
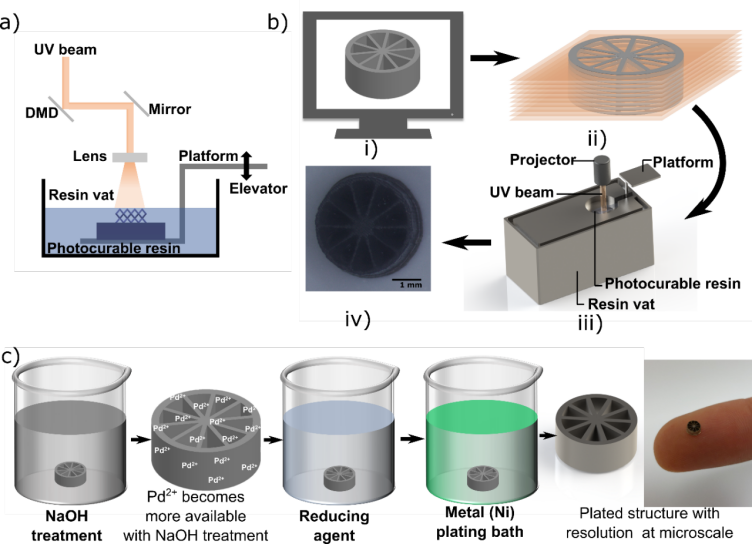
图 1:使用 BMF microArch S140 3D 打印机对金属-聚合物混合微结构进行 3D 打印。a) PμSL技术示意图。b) 基于 PμSL 技术的微结构3D 打印过程 i) CAD 建模 ii) 切片 iii) PμSL 3D 打印 iv) 最终样品。c) 用于金属-聚合物混合微结构的化学镀工艺。
微尺度金属三维结构的制造过程主要分为两个步骤:(i) 微尺度结构的PμSL打印。(2) 对打印样品表面的化学镀。团队成员使用面投影微立体光刻技术 (nanoArch S140, 摩方精密) 完成器件的制备。化学镀的流程如图1(c)所示。 (1) 用酒精以及去离子水清洗使用催化剂树脂打印的样品 (2) 将样品浸入 50 ºC 的 0.2 M NaOH 中 30 分钟以便于树脂的开环,使 Pd2+活跃在样品表面。 (3) 用去离子水清洗样品上多余的NaOH。(4) 将样品浸入NaH₂PO₂溶液中,50℃搅拌15分钟,使Pd (II)还原为Pd。(5) 重复去离子水清洗 (6) 将样品进行Ni-P/Cu 或Co-P 化学镀浴。(7) 用去离子水洗涤样品并吹干。为了通过微型 3D 打印技术制造微尺度结构,上述团队进行了打印材料配方的优化。基础配方是一种水洗光敏树脂。在不同的溶剂和条件下制备不同的PdCl2催化剂树脂,并将其放置5小时,通过观察是否有明显的沉淀现象产生,验证其稳定性。而后改变PdCl2浓度,研究其对催化剂树脂稳定性的影响(如图2所示)。
结果显示,使用 0.7 M NH4Cl制备的 PdCl2催化剂树脂具有良好的稳定性,可打印精度达50μm的微尺度结构。本研究在化学镀方法上有了很大改进,可以摆脱传统对于有毒化学药品的使用,同时均匀地将Ni、Cu、Co等金属镀在复杂三维微结构上,展现了在微电子、微型机器人等领域的巨大应用潜力。

图 2:在不同 PdCl2 浓度条件下制备的催化剂树脂的稳定性。a) 在 0.7M NH4Cl 中用不同浓度的 Pd(II) 制备的催化剂树脂,以研究 Pd(II) 浓度对催化剂树脂稳定性的影响,i) 不同的 Pd(II) 溶液,ii) 催化剂树脂混合物b )相同Pd(II)浓度下,不同老化时间的催化剂树脂。

图 3:a) 树脂与打印机参数测试。b) 打印试样化学镀测试。c) 3D 打印微观结构精度比较 i) 水洗树脂和 ii) 催化剂树脂。
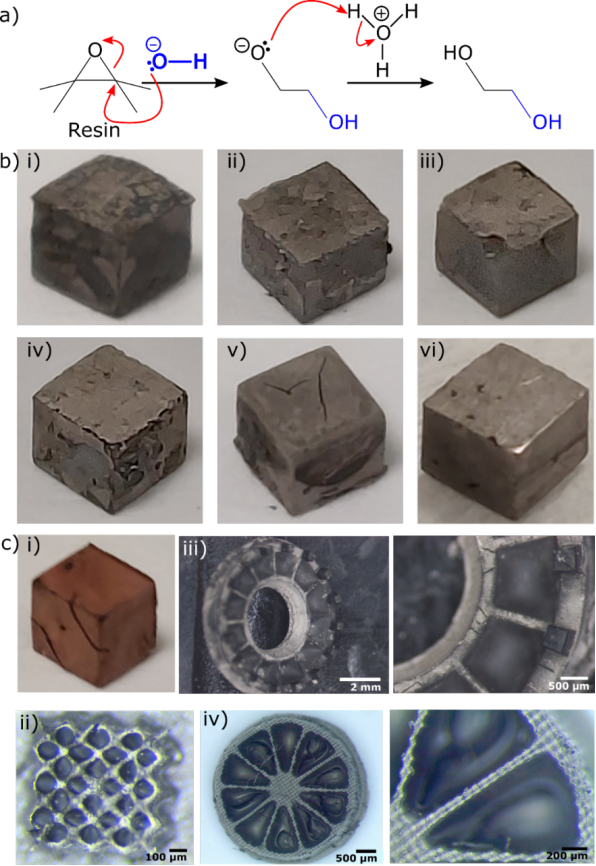
图 4:a) 树脂环断裂的碱性水解机理。b) 化学镀工艺优化。c) 化学镀 3D 打印结构。i) 镀铜立方体 ii) 镀镍网格立方体 iii) 镀钴齿轮 iv)镀镍迷你轮。
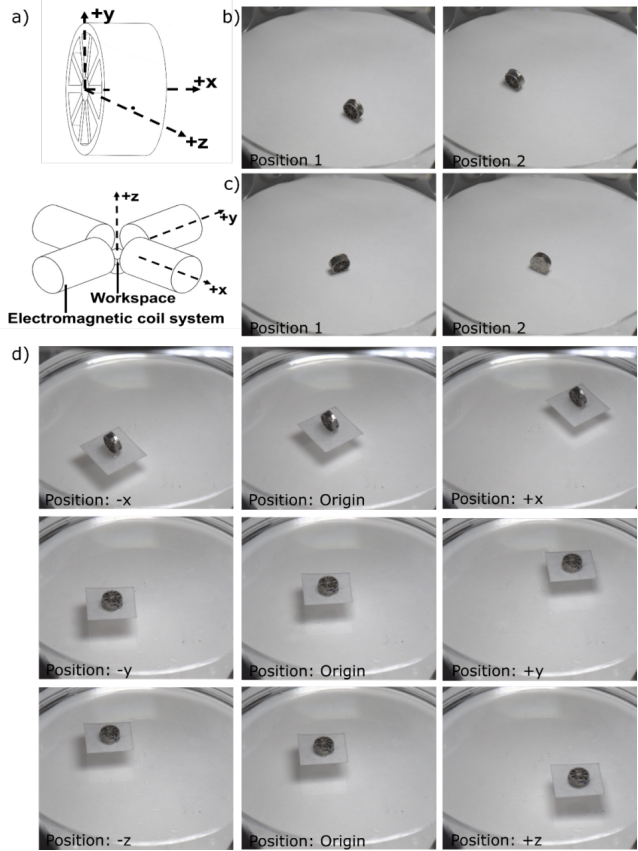
图 5:微尺度3D打印化学镀的应用。磁性微尺度机器人的运动 a) 研究中使用的局部和全局坐标系示意图 b) 绕 局部坐标系x 轴旋转以沿全局坐标系x 方向滚动 c) 绕局部坐标系 y 轴旋转 d) 沿局部坐标系 i) x 轴 ii) y 轴和 iii) z 轴移动。
原文链接:
https://doi.org/10.1016/j.addma.2022.103317