东京大学《Biofabrication》:嵌入骨骼肌组织的支柱电极,用于选择性刺激具有增加收缩距离的生物混合致动器
发布日期:2024-06-24
浏览量:583次
随着功能性纳米材料、纳米催化、微纳加工技术等纳米科技的飞速发展,为机器人技术和微纳生物学/纳米医学之间的结合,找到了一条可行路径,微纳米机器人应运而生。因其体积小、可无线操控、灵敏度高等优势,在疾病诊断、靶向药物送、微创手术、生物传感等领域展现出巨大的潜力和广泛的应用价值。
工业 4.0趋势和生产流程自动化一直在不断推动微纳米机器人在工业环境中的部署,据FMI(Future Market Insights)的统计及预测,2023年全球微型机器人市场估值达到了317.3亿美元,预计2033年将达到1591.7亿美元,年复合增长率(CAGR)为17.5%(2023-2033)。

根据材料不同,微纳米机器人可分为人工型、生物型、生物混合型三种。其中生物混合机器人(biohybrid robots)具有高能量转换效率和生物相容性的特征,通常作为驱动器的活体生物,预计将在全球微型机器人市场继续受到关注,2023 年至 2033 年的年复合增长率为 17.0%。

生物混合机器人,主要由生物组织构成,其优势在于可生物降解、自我修复和强适应性,这使得它们在模仿生物体方面拥有巨大的发展空间。电极对于控制生物混合机器人的运动至关重要,然而,当电极安装在肌肉组织外部时,往往会以低效且非选择性的方式影响邻近的生物混合执行器。因此,研发能够选择性刺激高收缩距离的肌肉组织的嵌入式电极,已成为一个迫切需要解决的问题。
鉴于此,东京大学研究团队研发了一种可嵌入骨骼肌组织的柱状电极,实现对目标肌肉的强化收缩,同时确保距离目标肌肉4毫米远的邻近组织不受影响。
相关研究成果以"Pillar electrodes embedded in the skeletal muscle tissue for selective stimulation of biohybrid actuators with increased contractile distance"为题发表在《Biofabrication》上。

研究团队通过使用有限元方法(FEM)模拟来建立选择性模型,将肌肉组织内电场强度的体积积分(VIE)与不同电脉冲幅值下的实际收缩距离相关联。

图1. 嵌入骨骼肌组织的柱状电极与传统电极的概念对比和结构设计分析
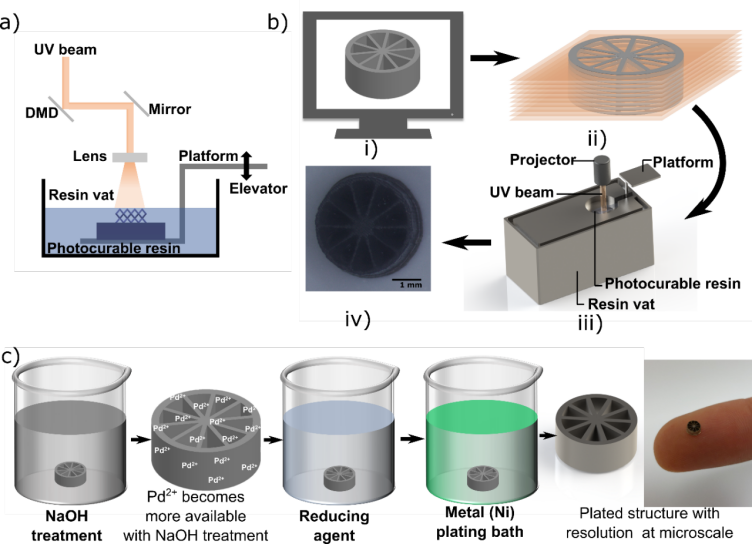
研究中的柱状电极是由柱状金属阵列和底座封装而成。在实验中,研究团队利用摩方精密面投影微立体光刻(PμSL)3D打印技术(nanoArch® S140,精度:10μm)制备了微柱阵列模具以及底座(内部含有流道)。
其中微柱阵列模具结合PDMS翻模技术得到柱状电极模具(PDMS cap),再与底座组装后,采用真空填充方法注入低熔点合金,最终成功制备了柱状电极。实验证实,柱状电极在实现收缩距离和选择性方面,优于传统的金棒电极。此外,模拟得到的选择性指数与实验数据相吻合,这进一步表明了柱状电极在高效且选择性地刺激生物混合执行器方面具有显著潜力。

图2. 柱状电极制备流程
综上,采用柱状电极驱动的生物混合机器人能够执行更加复杂的运动。这种创新技术在制造肌肉组织密集排列的生物混合机器人领域显示出巨大的发展潜力。
通过微纳3D打印技术,可以在微纳米机器人中集成更多的功能,如传感器、执行器等,这使得微纳米机器人能够执行更复杂的任务,如在细胞内部进行药物递送,或在微小空间内进行精细的操作。
摩方精密始终致力于提供高精密、高公差控制、高质量、高标准的技术支持与服务。随着最新发布的复合精度光固化3D打印技术推出,摩方精密为行业产品创新和迭代提供了一种全新的提能增效解决方案,解决了跨尺度加工难题的同时,加速了原型制造的过程。这项技术的应用,将进一步推动器件向微型化、多功能化和集成化方向发展,为各个领域的技术创新提供强有力的支持。
原文链接:
https://doi.org/10.1088/1758-5090/ad4ba1