南科大杨灿辉和葛锜团队《Nature Communications》:多材料3D打印具有多模式传感功能的离子电容传感器
发布日期:2024-04-03
浏览量:554次
在过去十年中,离电器件(Ionotronics or Iontronics,离子-电子混合器件,即基于离子与电子协同作用的器件)因其固有的柔韧性,可拉伸性,光学透明性和生物相容性等优势引起了越来越多的关注。然而,现有的离电传感器由于器件结构简单、成分易泄漏,导致器件稳定性差,传感功能单一,极大地限制了实际应用。因此,设计制造性能稳定且具有多模式传感能力的离电传感器具有重要的工程应用价值。
南方科技大学力学与航空航天工程系杨灿辉团队与机械与能源工程系葛锜团队,报道了通过多材料光固化3D打印技术一体化设计制造基于聚电解质弹性体的多模式传感离子电容传感器,解决了传统离电传感器稳定性差和功能性单一的问题,为可拉伸离电传感器的设计、智造与应用提供了新的解决方案。
相关研究成果以“Polyelectrolyte elastomer-based ionotronic sensors with multi-mode sensing capabilities via multi-material 3D printing”为题发表在《Nature Communication》期刊。南方科技大学科研助理李财聪、博士生程健翔和何耘丰为论文共同第一作者,杨灿辉助理教授与葛锜教授为论文共同通讯作者。本研究得到了深圳市软材料力学与智造重点实验室和广东省自然科学基金等项目支持。

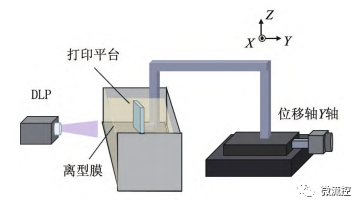
如图1所示,受人体皮肤对于拉、压、扭及其组合等外力的多模态感知能力的启发,研究人员利用多材料光固化3D打印技术制备了具有多模式传感能力的离电传感器。传感器采用了聚电解质弹性体(PEE),其高分子网络中含有固定的阴离子或阳离子,以及可移动的反离子,具备抗离子泄漏的特性。在打印过程中,PEE材料与传感器上的介电弹性体(DE)材料之间通过共价和拓扑互连形成了牢固的界面粘接。
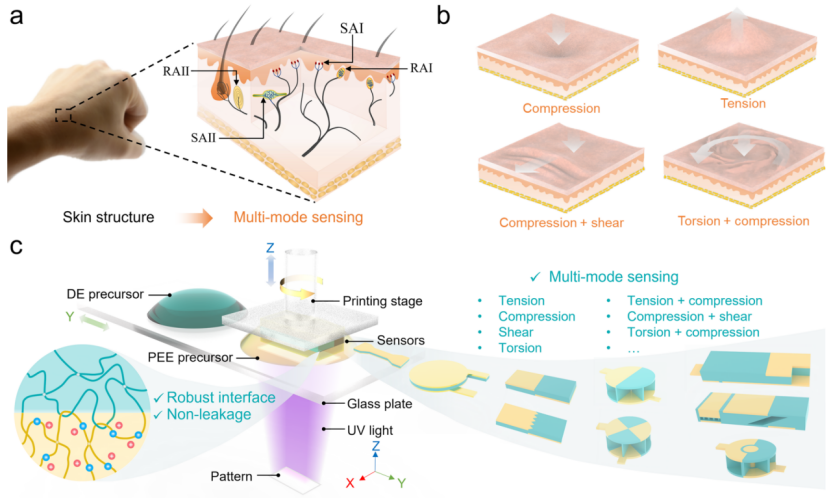
图1. 皮肤启发的多模式传感离电传感器。(a) 人体皮肤内多种力感受器示意图。(b) 人体皮肤可以感知单一的力学信号如压拉、压、压+剪、压+扭。(c) 基于多材料数字光固化3D打印技术制备具有多模式传感能力的离电传感器。
研究人员首先合成了一种名为1-丁基-3-甲基咪唑134-3-磺丙基丙烯酸酯(BS)的单体,作为聚电解质材料的组成成分之一,并与另一种名为MEA的疏水单体一起进行共聚。然后通过优化BS和MEA的比例,平衡聚电解质材料的力学性能和电学性能,从而优化传感器的性能,如图2所示。

图2. 聚电解质弹性体的设计、制备与光学、力学、电学性能以及热、溶剂稳定性。
如图3所示,研究人员进行光流变测试验证了所开发的PEE材料的可打印性。然后通过180°剥离测试,分别测量了3D打印和手动组装的PEE/DE双层结构的界面粘接强度。结果表明,3D打印的双层结构由于PEE和DE之间形成的共价键和拓扑缠结而具有强韧的界面,剥离过程发生了PEE材料的本体断裂, 粘接能达339.3 J/m2;相比之下,手动组装的PEE/DE双层结构界面弱,剥离过程发生了界面断裂,粘接能只有4.1 J/m2。在耐久度测试中,基于PEE的电容式传感器由于无离子泄漏可以长时间保持稳定的信号,而基于传统的LiTFSI掺杂离子弹性体的传感器由于离子泄漏,信号持续发生漂移,直至发生短路。

图3. 离电传感器的可打印性与性能。(a) PEE存储模量和损耗模量随光固化时间的变化曲线。(b) 固化时间与能量密度随层厚的变化关系。(c) 打印的PEE阵列展示。(d) 3D打印和手动组装的PEE/DE双层结构的180°剥离曲线。(e) 3D打印的PEE/DE双层结构本体断裂示意图。(f) 手动组装的PEE/DE双层结构界面断裂示意图。(g) 基于PEE和基于LiTFSI掺杂离子弹性体的电容式传感器的ΔC/C0随时间变化曲线。(h) 基于PEE的电容式传感器无离子泄漏。(i) 基于LiTFSI掺杂离子弹性体的电容式传感器离子泄漏示意图。
3D打印技术为器件的结构设计提供了极高的灵活性。如图4所示,研究人员分别设计并一体化打印了拉伸、压缩、剪切、扭转四种不同的离电传感器,器件均具有良好的性能和稳定性。特别地,通过器件的结构设计,即可以实现传感器灵敏度的大幅度优化,例如通过在压缩传感器的介电弹性体层引入微结构可以将灵敏度提高两个数量级,又可以实现传感器灵敏度的按需调控,例如通过设计剪切传感器前端的轮廓线或扭转传感器的扇形区域数量可以分别实现不同相应的剪切传感器和扭转传感器。

图4. 拉伸、压缩、剪切、扭转离电传感器。(a) 拉伸传感器原理示意图。(b) 电容-拉伸应变曲线。(c) 压缩传感器原理示意图。(d) 有/无微结构的压力传感器的电容-压力曲线。(e) 剪切传感器原理示意图。(f) 一种剪切传感器实物图。(g) 不同灵敏度的剪切传感器的电容-剪切应变曲线。(h) 剪切传感器的疲劳测试曲线。(i) 扭转传感器原理示意图。(j) 一种扭转传感器实物图。(k) 不同灵敏度的扭转传感器的电容-扭转角曲线。(l) 扭转传感器的疲劳测试曲线。
如图5所示,研究人员进一步设计并一体化打印了拉压、压剪、压扭三种组合式离电传感器。组合式传感器最大的挑战之一在于不同传感通路之间相互的信号串扰,例如,当器件拉伸时,由于材料的泊松效应会导致垂直方向上的器件几何尺寸缩小,等效于压缩变形,导致拉伸激励引起压缩通道的信号变化。研究人员结合有限元模拟分析,通过合理的器件结构设计,有效地避免了不同通道之间的信号串扰。

图5. 组合式离电传感器。(a) 拉压组合传感器示意图。(b) 器件实物图。(c) 拉压组合传感器等效电路图。(d) 单一传感模式下的器件信号。(e) 压缩激励下的电容-圈数变化曲线。(f) 拉伸激励下的电容-圈数变化曲线。(g) 拉压组合变形下的信号谱。(h) 压剪组合传感器示意图。(i) 器件实物图。(j) 压剪组合传感器等效电路图。(k) 单一传感模式下的器件信号。(l) 压扭组合传感器示意图。(m) 器件实物图。(n) 压扭组合传感器等效电路图。(o) 单一传感模式下的器件信号。
最后,研究人员展示了一个由四个剪切传感器和一个压缩传感器组成的可穿戴遥控单元,并将其连接到一个远程控制系统,用于远程无线控制无人机的飞行,如图6所示。这个可穿戴遥控单元中的四个剪切传感器负责感知手部的手指运动,用于控制无人机的方向。而压缩传感器则用于感知手指的压力,控制无人机的翻滚。这种可穿戴遥控单元的设计可以实现人机交互,提供更加灵活的控制方式。

图6. 组合式离电传感器用于无人机的远程无线操控。(a) 无人机控制系统示意图。(b) 组合式离电传感器中剪切传感模块工作模式示意图。(c) 剪切传感模块工作原理。(d) 传感器五个通道电容信号测试。(e) 指令编译逻辑。(f) 组合式离电传感器实时电容信号。(g) 不同时刻的无人机飞行状态。
文章来源:高分子科技
论文链接:
https://doi.org/10.1038/s41467-023-40583-5
基于高精度数字光处理3D打印技术和独家离心式多材料切换技术,MultiMatter C1多材料3D打印装备可实现任意复杂异质结构快速成型,在力学超材料、生物医学、柔性电子、软体机器人等领域具有重要应用潜力。

离心式多材料切换技术:独家开发的离心式多材料切换技术可实现高效材料切换和残液去除。离心转速可调,最高达8000转/分钟,60秒内即可完成多材料切换,单次打印多材料切换最大次数高达2000次,处于业内领先水平。

可打印材料范围广:该设备支持粘度在50-5000 cps范围内的硬性树脂、弹性体、水凝胶、形状记忆高分子和导电弹性体等材料及这些材料组合结构的多材料3D打印,为不同行业和应用领域,提供了材料选择的灵活性。

多功能多材料耦合结构实现:该设备可打印高复杂度、高精度、多功能、多材料耦合结构,支持同时打印2种材料,可打印层内多材料和层间多材料,且多材料层内过渡区尺寸在200μm以内,为复杂多材料结构制造提供高精度解决方案。